Rover
A smart RC car and a foundational platform for autonomous navigation experiments.
Mission Objective
Develop a rover with wireless control and eventually autonomous navigation.
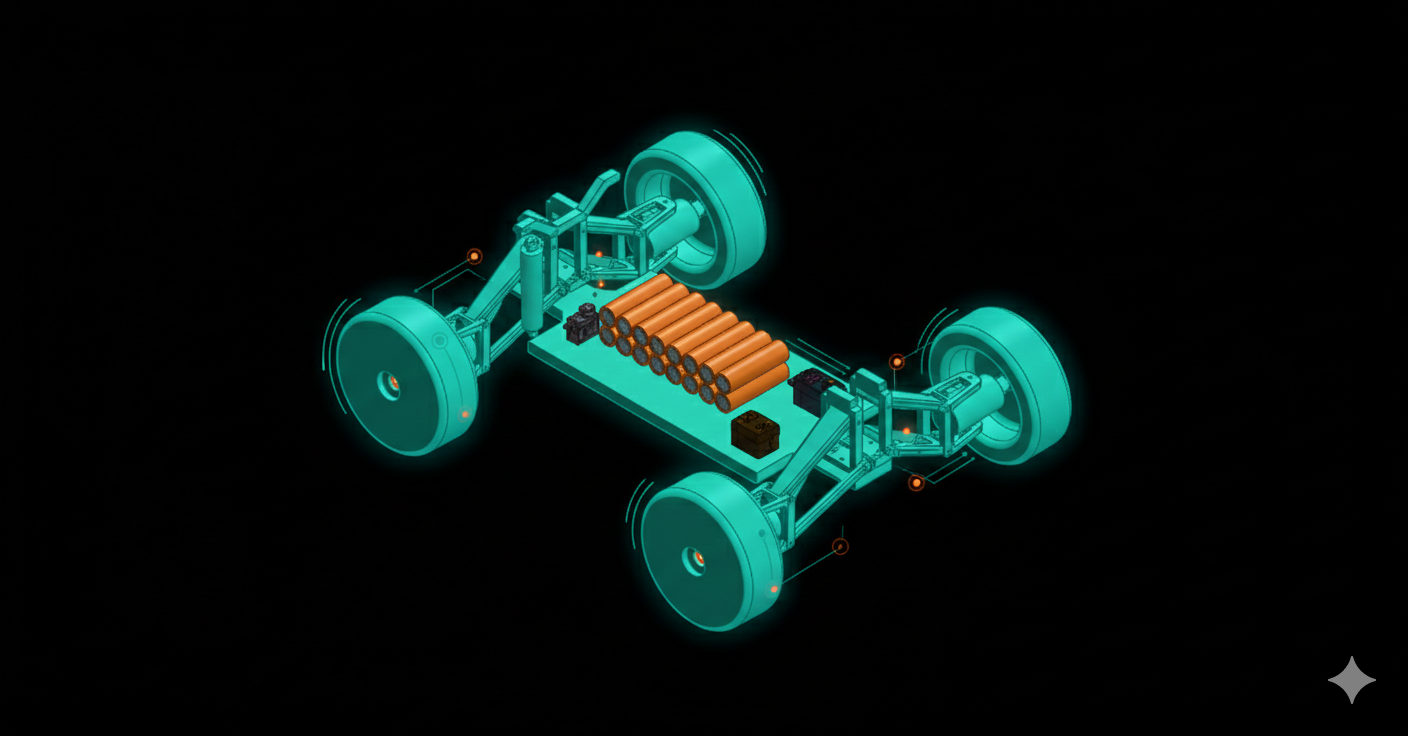
Project Overview
A smart RC car built as a foundational platform for autonomous navigation experiments. Starting with wireless joystick control and working toward self-driving capabilities using lessons from the GG Swarm project.
Technical Approach
- Compute: Arduino-based control with XBee wireless communication
- Input: PS4 controller for manual driving
- Drive: DRV8871 motor drivers for differential steering
- Chassis: 3D-printed custom frame
- Software: C++ firmware for motor control and wireless command parsing
Connection to GG Swarm
Like the Drone project, this rover is a stepping stone toward real-world autonomous coordination. The plan is to apply navigation and consensus algorithms developed in simulation to physical ground-based platforms.
Project Log
No log entries found for this project.